A.T.M (Anti Transmission Mechanism)
Created By

Adhrit Choudhary
My name is Roshan; I am 13 years old and I am in 7th standard. My hobbies are horse riding, robotics, and computer programming.
About This Project
Hello everyone !
My name is Adhrit Choudhary, I am 10 years old. I am a student of MECHATRON ROBOTICS, New Delhi. I have completed a fully fledged Arduino and Electronics course in just 2 months. I have always been fascinated towards Coding and Automation. I want to become a Pokemon Trainer, Hehe, I want to make my own Pokeball to catch pokemons. I know it sounds childish but i’m 10. I want to use Arduino programming to create a replica of Pokeball.I would also love to contribute towards the INDIAN DEFENCE SERVICES.
A.T.M (Anti Transmission Mechanism) will help people withdraw cash from any ATM without actually making a physical contact with the switches. An ultrasonic sensor is used to provide input to the ATM Machine. For ex- If your input pin if 4578, then you will put your hand at 40cm, 50cm, 70cm, and 80cm for a moment of time. Depending on the distance, any person can input his pin. The buttons on the machine will be pressed by the Servo Motors attached.
This project can also be used to turn ON and OFF any switch at home or offices.
Looking forward for more innovative ideas at Arduino Project Hub.
Thanks Everyone !
Stay Safe and Happy !
Components Required
- Arduino UNO
- Ultrasonic Sensor
- SG90 Micro-Servo Motor
- Buzzer
- Jumper Wires
- 9V 1A switching Wall Supply
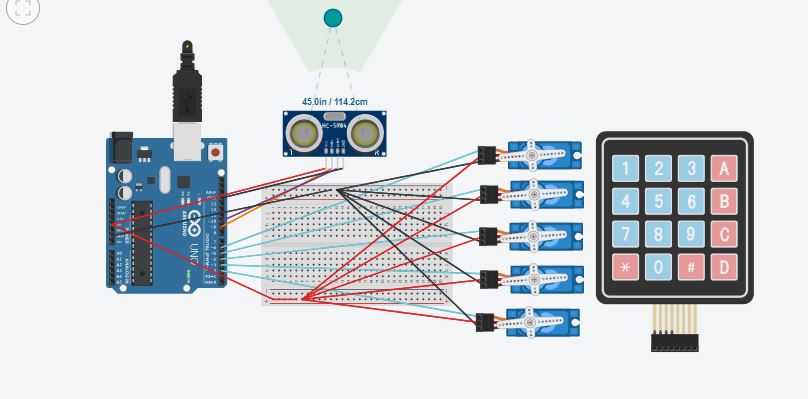
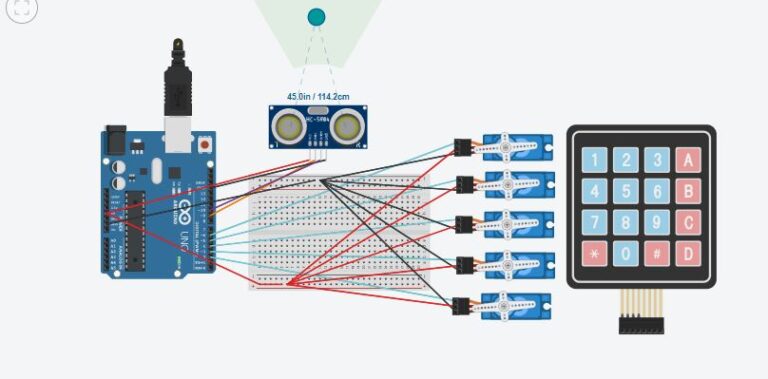
Schematics
In this image all the components with the connections are given
Code Of Project
#include<Servo.h>
int trigger=9;
int sensor=0;
int echo=10;
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
Servo servo5;
long calibration (int trigger,int echo){
pinMode(trigger,OUTPUT);
digitalWrite(trigger,LOW);
delayMicroseconds(2);
digitalWrite(trigger,HIGH);
delayMicroseconds(10);
digitalWrite(trigger,LOW);
pinMode(trigger, INPUT);
return pulseIn(echo,HIGH);
}
void setup(){
servo1.attach(2);
servo2.attach(3);
servo3.attach(4);
servo4.attach(5);
servo5.attach(6);
}
void loop()
{
sensor = 0.01723 * calibration(9,10);
Serial.println(sensor);
delay(500);
if (sensor < 100 && sensor > 90){
servo1.write(90);
delay(400);
servo1.write(0);
}
if (sensor < 90 && sensor > 80){
servo2.write(90);
delay(400);
servo2.write(0);
}
if (sensor < 80 && sensor > 70){
servo3.write(90);
delay(400);
servo3.write(0);
}
if (sensor < 70 && sensor > 60){
servo4.write(90);
delay(400);
servo4.write(0);
}
if (sensor < 60 && sensor > 50){
servo5.write(90);
delay(400);
servo5.write(0);
}
}

