Categories
Bluetooth car
Created By

Yash Ghunavat
My name is Yash Nilesh Ghunavat. I am 13 years old. I want to become a Robotics Engineer when I grow up. I have made many projects in Mechatron Robotics like Gripper Robot, Bluetooth Control Car, Bluetooth Controlled Light Bulb, Clap to on Light Bulb, Dancing LED etc.
About This Project
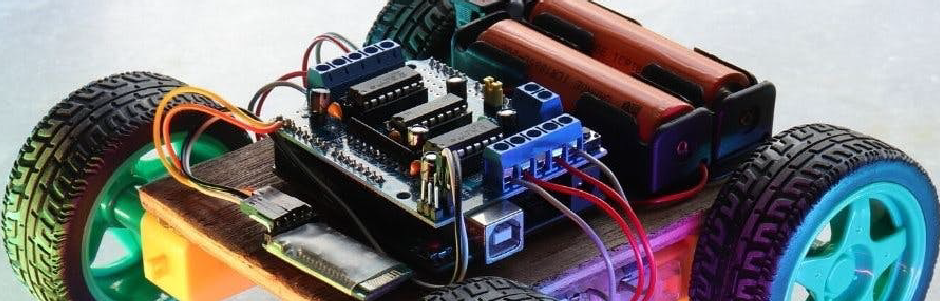
Bluetooth Car is an Arduino based project code for the particular project is written below
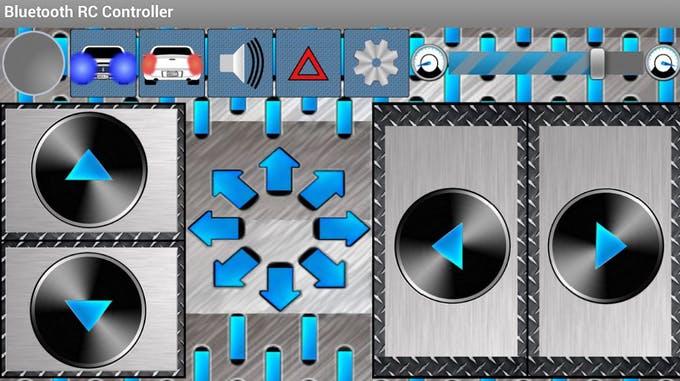
this app use to control car
https://play.google.com/store/apps/details?id=braulio.calle.bluetoothRCcontroller&hl=en_IN&gl=US
Components Required
- Arduino UNO
- DC Motor
- HC-05 Bluetooth Module
- af motet driver shild
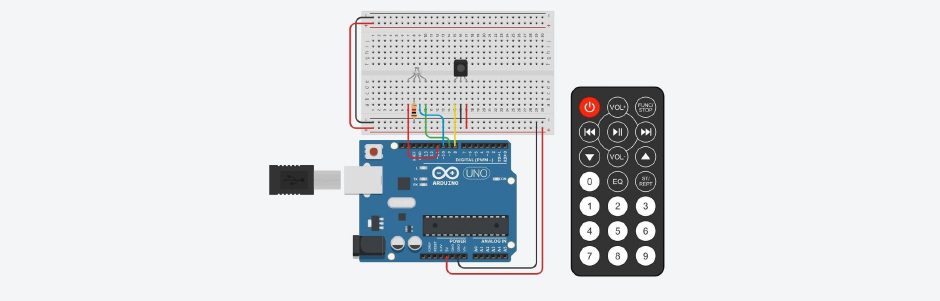
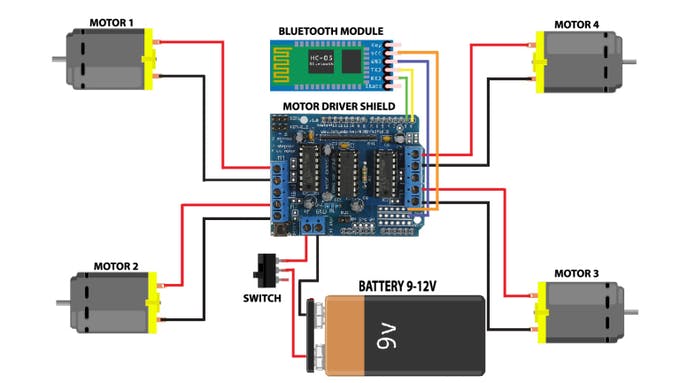
Schematics
In this image all the components with the connections are given
Code Of Project
//Arduino Bluetooth Controlled Car
//Before uploading the code you have to install the necessary library
//Note - Disconnect the Bluetooth Module before hiting the upload button otherwise you'll get compilation error message.
//AFMotor Library https://learn.adafruit.com/adafruit-motor-shield/library-install
//After downloading the library open Arduino IDE >> go to sketch >> Include Libray >> ADD. ZIP Libray >> Select the downloaded
//ZIP File >> Open it >> Done
//Now You Can Upload the Code without any problem but make sure the bt module isn't connected with Arduino while uploading code
#include <AFMotor.h>
//initial motors pin
AF_DCMotor motor1(1, MOTOR12_1KHZ);
AF_DCMotor motor2(2, MOTOR12_1KHZ);
AF_DCMotor motor3(3, MOTOR34_1KHZ);
AF_DCMotor motor4(4, MOTOR34_1KHZ);
char command;
void setup()
{
Serial.begin(9600); //Set the baud rate to your Bluetooth module.
}
void loop(){
if(Serial.available() > 0){
command = Serial.read();
Stop(); //initialize with motors stoped
//Change pin mode only if new command is different from previous.
//Serial.println(command);
switch(command){
case 'F':
forward();
break;
case 'B':
back();
break;
case 'L':
left();
break;
case 'R':
right();
break;
}
}
}
void forward()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(FORWARD); //rotate the motor clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(FORWARD); //rotate the motor clockwise
motor3.setSpeed(255);//Define maximum velocity
motor3.run(FORWARD); //rotate the motor clockwise
motor4.setSpeed(255);//Define maximum velocity
motor4.run(FORWARD); //rotate the motor clockwise
}
void back()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(BACKWARD); //rotate the motor anti-clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(BACKWARD); //rotate the motor anti-clockwise
motor3.setSpeed(255); //Define maximum velocity
motor3.run(BACKWARD); //rotate the motor anti-clockwise
motor4.setSpeed(255); //Define maximum velocity
motor4.run(BACKWARD); //rotate the motor anti-clockwise
}
void left()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(BACKWARD); //rotate the motor anti-clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(BACKWARD); //rotate the motor anti-clockwise
motor3.setSpeed(255); //Define maximum velocity
motor3.run(FORWARD); //rotate the motor clockwise
motor4.setSpeed(255); //Define maximum velocity
motor4.run(FORWARD); //rotate the motor clockwise
}
void right()
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(FORWARD); //rotate the motor clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(FORWARD); //rotate the motor clockwise
motor3.setSpeed(255); //Define maximum velocity
motor3.run(BACKWARD); //rotate the motor anti-clockwise
motor4.setSpeed(255); //Define maximum velocity
motor4.run(BACKWARD); //rotate the motor anti-clockwise
}
void Stop()
{
motor1.setSpeed(0); //Define minimum velocity
motor1.run(RELEASE); //stop the motor when release the button
motor2.setSpeed(0); //Define minimum velocity
motor2.run(RELEASE); //rotate the motor clockwise
motor3.setSpeed(0); //Define minimum velocity
motor3.run(RELEASE); //stop the motor when release the button
motor4.setSpeed(0); //Define minimum velocity
motor4.run(RELEASE); //stop the motor when release the button
}