Arduino IR remote controlled Car
Categories
Arduino IR remote controlled Car

Created By

Roshan Baig
My name is Roshan, I am 13 years old and I am in 7th standard. My hobbies are horse riding, robotics, and computer programming.
About This Project
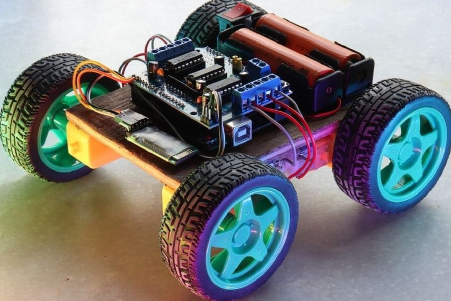
Arduino IR remote controlled Car
The project is arduino based project. I had spare time, so I made this.
This is the projects link
https://www.tinkercad.com/things/5xdxIXiPG4Y
and an old version
Components Required
- Arduino UNO
- LED Light bulb, Frosted GLS
- Texas Instruments Dual H-Bridge Motor drivers L293D
- 5mm LED :Red
- Through Hole Resistor , 1Kohm
- IR receiver
- IR Remote
- DC Motor, Miniature
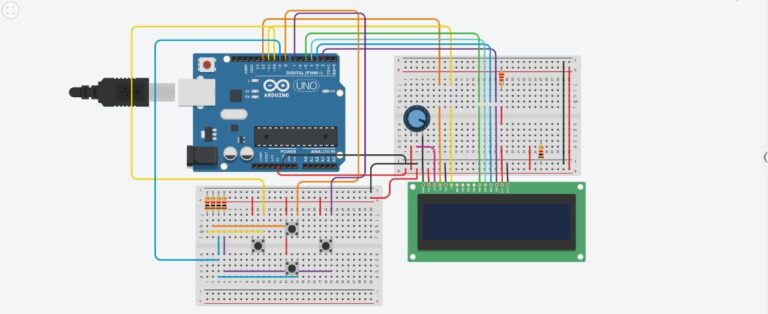
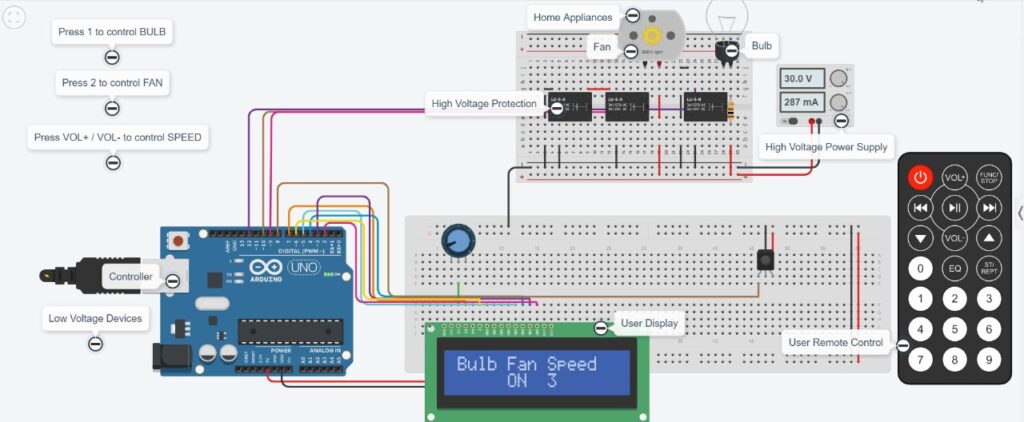
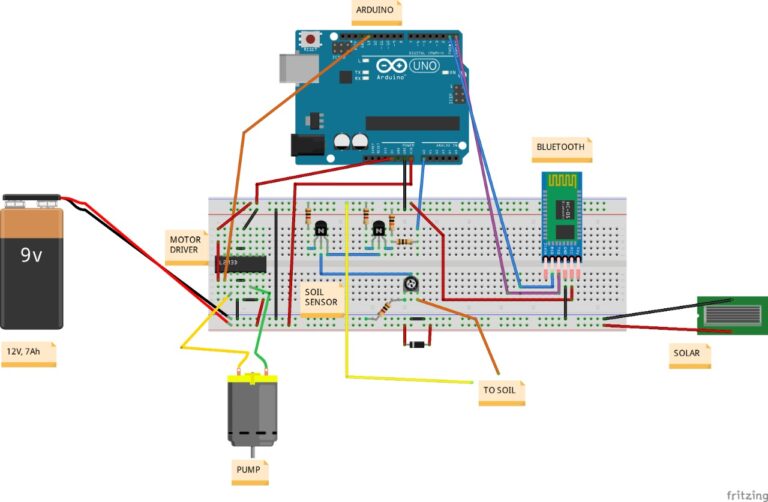
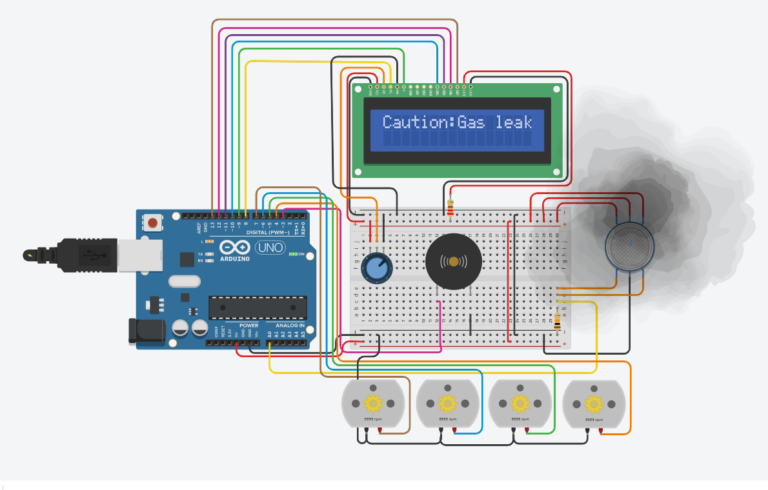
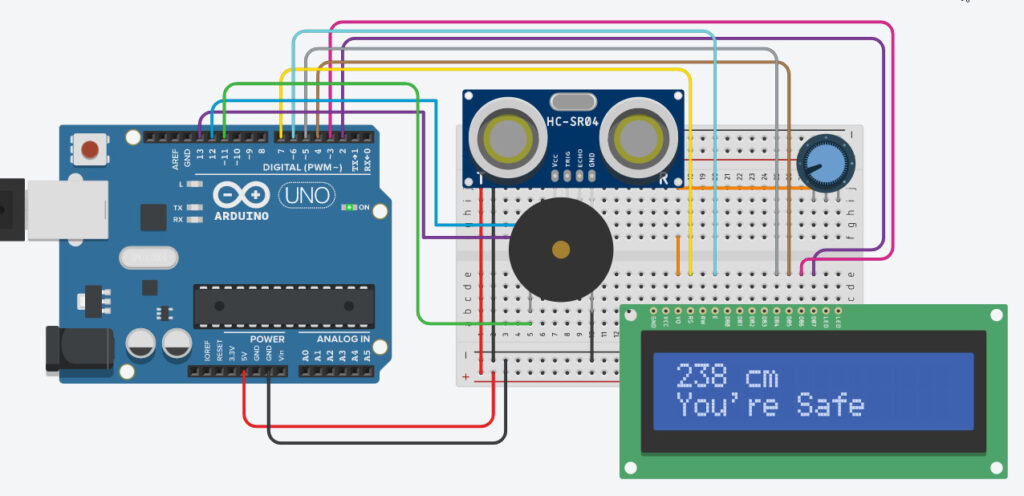
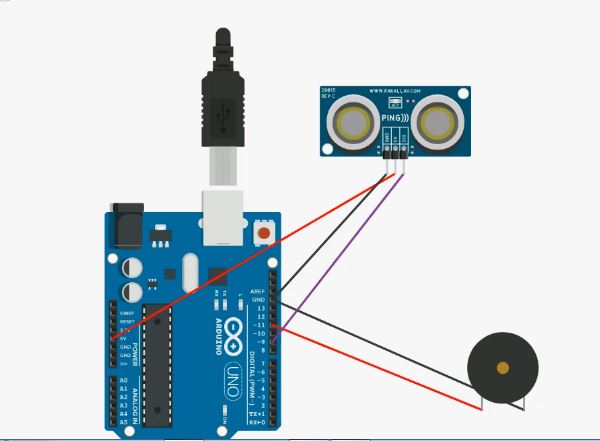
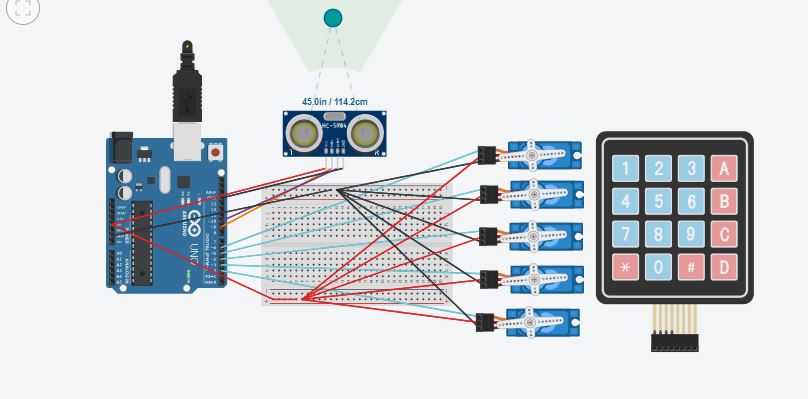
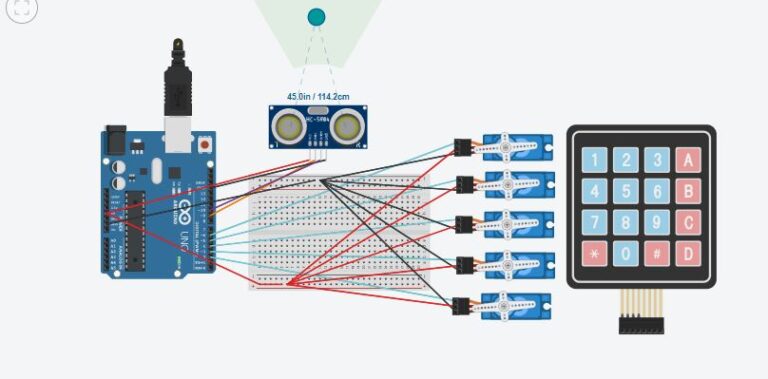
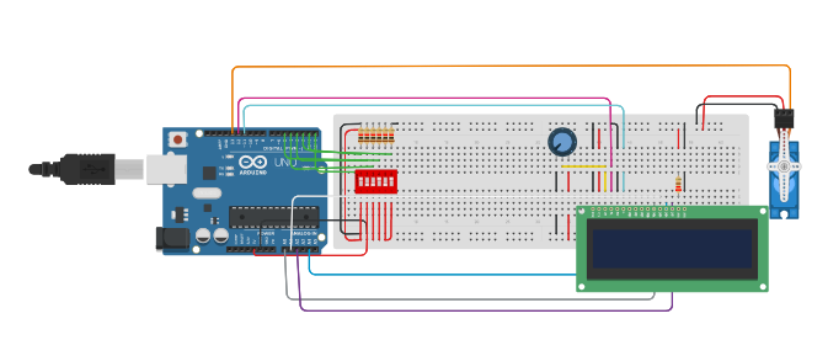
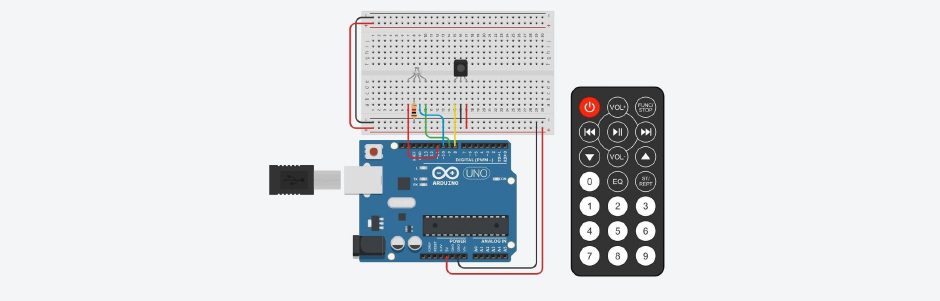
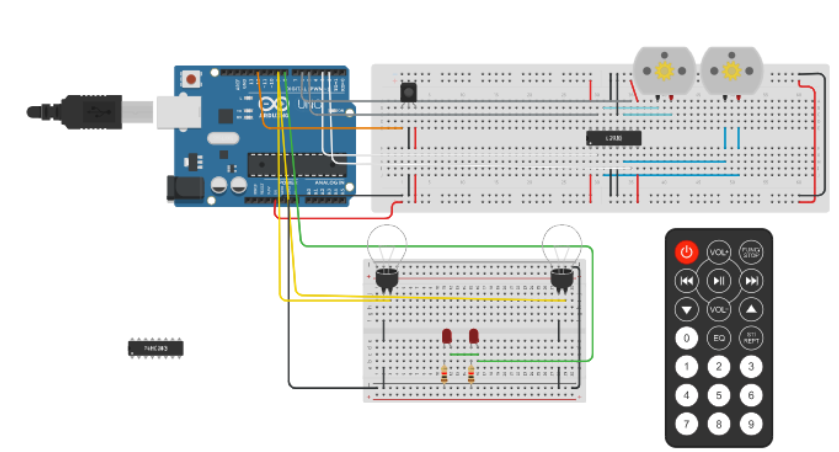
Schematics
In this image all the components with the connections are given
Code Of Project
#include <IRremote.h>
int receiver = 12;
int speed = 100;
IRrecv irrcev(receiver);
decode_results results;
void setup()
{
pinMode(6, OUTPUT);
pinMode(5, OUTPUT);
pinMode(3, OUTPUT);
pinMode(2, OUTPUT);
pinMode(9, OUTPUT);
pinMode(8, OUTPUT);
pinMode(A0, OUTPUT);
irrcev.enableIRIn();
}
void loop()
{
if(irrcev.decode(&results))
{
irrcev.resume();
}
if(results.value == 16613503)
{
move_forward();
}
if(irrcev.decode(&results))
{
irrcev.resume();
}
if(results.value == 16621663)
{
stop();
}
if(irrcev.decode(&results))
{
irrcev.resume();
}
if(results.value == 16617583)
{
move_back();
}
if(irrcev.decode(&results))
{
irrcev.resume();
}
if(results.value == 16589023)
{
turn_left();
}
if(irrcev.decode(&results))
{
irrcev.resume();
}
if(results.value == 16605343)
{
turn_right();
}
if(irrcev.decode(&results))
{
irrcev.resume();
}
if(results.value == 16580863)
{
headlights();
}
if(irrcev.decode(&results))
{
irrcev.resume();
}
if(results.value == 16597183)
{
taillights();
}
}
void move_forward()
{
digitalWrite(5, LOW);
digitalWrite(2, LOW);
digitalWrite(6, HIGH);
digitalWrite(3, HIGH);
}
void turn_right()
{
digitalWrite(5, LOW);
digitalWrite(3, LOW);
digitalWrite(2, LOW);
digitalWrite(6, HIGH);
}
void turn_left()
{
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
}
void move_back()
{
digitalWrite(6, LOW);
digitalWrite(3, LOW);
digitalWrite(5, HIGH);
digitalWrite(2, HIGH);
}
void stop()
{
digitalWrite(5, LOW);
digitalWrite(2, LOW);
digitalWrite(6, LOW);
digitalWrite(3, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
}
void headlights()
{
digitalWrite(9, HIGH);
}
void taillights()
{
digitalWrite(8, HIGH);
}